L’Agence d’Exploration Aérospatiale Japonaise (JAXA) vient de marquer l’histoire avec le déploiement de 2 robots compacts sur la Lune.
Ces petites merveilles technologiques ont démontré une gamme innovante de technologies miniaturisées, soulignant l’ingéniosité et l’ambition de la JAXA dans sa récente mission lunaire.
Une Réussite Historique pour la JAXA
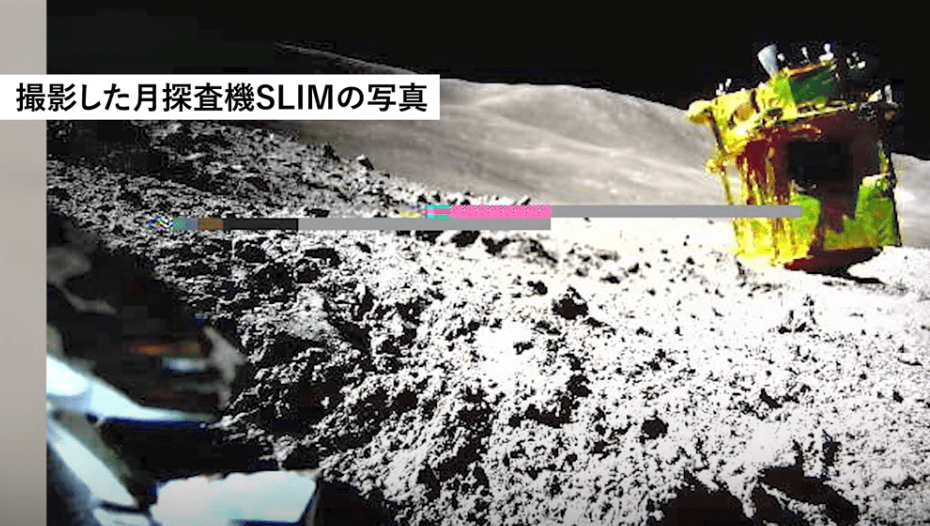
Parmi les réalisations notables de cette mission figure la documentation de l’atterrissage historique de la sonde Smart Lander for Investigating Moon (SLIM) de la JAXA, faisant du Japon le cinquième pays à poser un engin spatial non habité sur la Lune.
À lire aussi sur dondon.media : ⛱️ Stress au travail au Japon, voilà 5 emplois les plus relax selon une enquête japonaise
Une image capturée par une machine de seulement 8 centimètres de diamètre révèle que SLIM s’est posé sur la surface lunaire le 20 janvier, mais à l’envers.
Preuves Cruciales Obtenues
Les 2 petits robots, libérés sur la Lune alors que SLIM se trouvait à environ 5 mètres de la surface, ont joué un rôle clé dans cette mission. LEV-2, pesant 250 grammes et de la taille d’une balle de baseball, s’est transformé après son atterrissage pour commencer sa mission, capturant plusieurs images. Ces données ont été transmises à LEV-1, qui les a ensuite envoyées sur Terre, fournissant ainsi la preuve définitive de l’atterrissage de SLIM sur la surface lunaire.
Le futur de LEV-1 et 2
LEV-1 a démontré une capacité de mobilité spécialisée, en effectuant six bonds sur la surface lunaire grâce à un système de ressort actionné par un moteur, une première pour un robot explorant un corps céleste. LEV-2, quant à lui, est devenu la machine la plus petite et la plus légère à avoir fonctionné sur la Lune.
Ces robots ont également réalisé l’exploration simultanée de la Lune, communiquant entre eux sans assistance depuis la Terre, marquant une première pour des véhicules entièrement autonomes.
Inspiré par la manière dont les tortues de mer nouvellement écloses grimpent les plages de sable en pente, le professeur Kimitaka Watanabe de l’Université Doshisha, a conçu LEV-2 (surnommé « Sora-Q ») pour avancer de manière stable même sur des pentes de 30 degrés, en utilisant des technologies de transformation de jouets. Cette approche innovante a permis à LEV-2 de réussir sa mission, capturant des images cruciales de SLIM.

Les données envoyées par ces robots sont actuellement analysées, avec l’espoir que les leçons tirées de leur fonctionnement informeront les futures initiatives d’exploration spatiale mondiales.
📌 Pour ne rien rater de l’actualité du Japon par dondon.media : suivez-nous via Google Actualités, X, E-mail ou sur notre flux RSS.